Competitive Parking
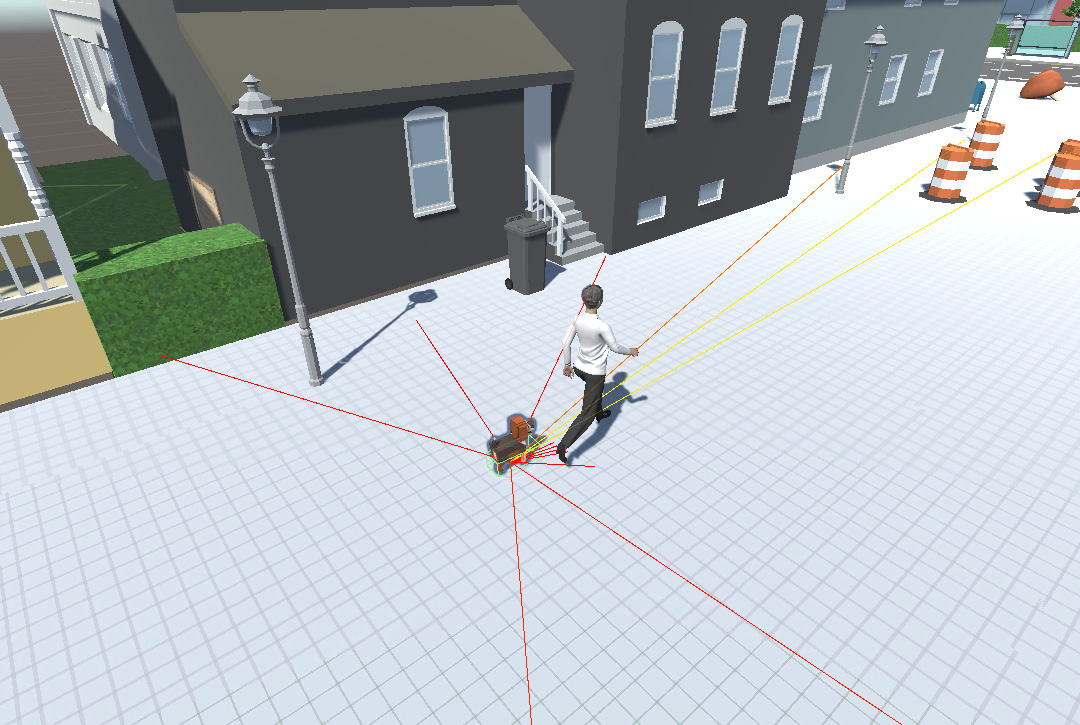
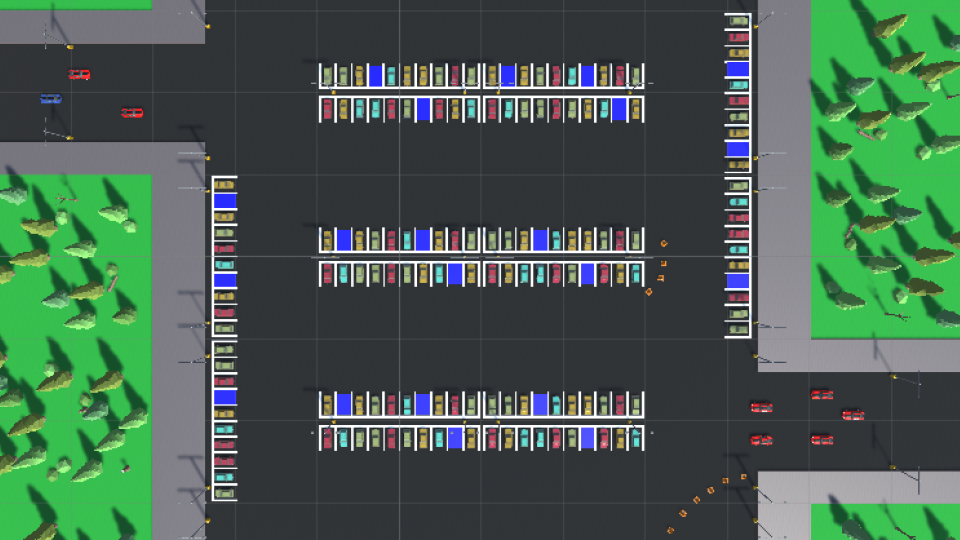
Competitive Parking is a ML-Agent project with Unity where many car agents compete with each other to find a parking lot. The car agents have been successively trained with Curriculum Reinforcement Learning to adapt to increasingly large and more complex parking lots, and an increasing number of competing agents. Parking lots are procedurally generated and can grow to any size. While we do not want the cars to park perpendicularly and crash everywhere, the agents have been trained to park and drive fast. After all, we do not want the player to got any free space, do we. :)
Team
Parking was developed by
Rulu Liao, Human-Machine Interaction Master
Marcel Quanz, Informatics Master